Overview
We introduce a new method for exploration in robot manipulators. We show that this method works well on sparse-reward tasks as pretraining task.
The paper is available on OpenReview - https://openreview.net/forum?id=VfGk0ELQ4LC and an older version on arXiv - https://arxiv.org/abs/2104.00442
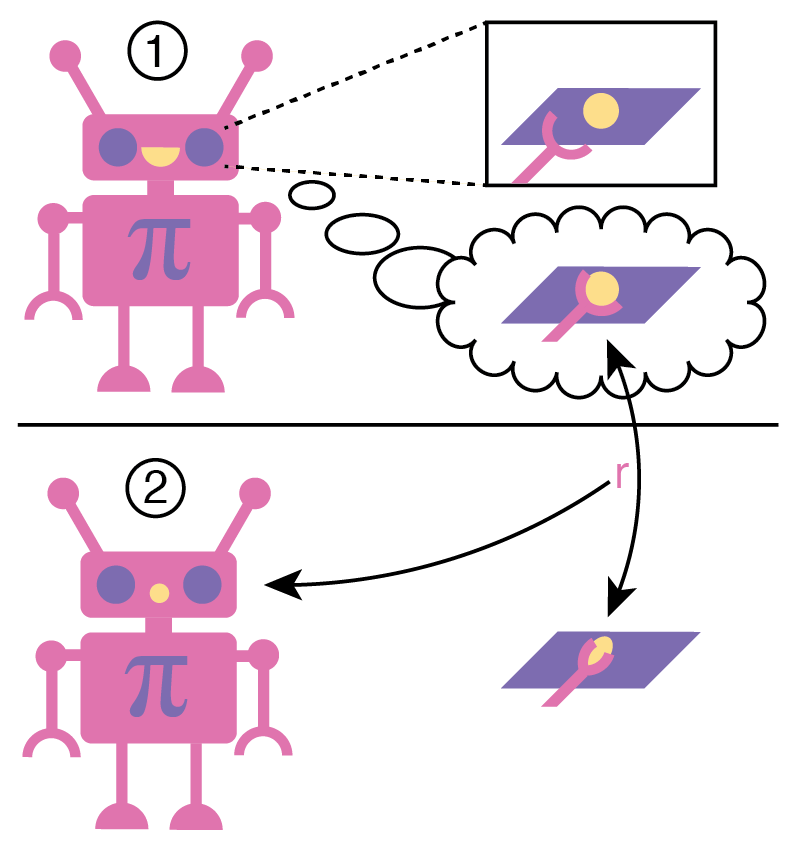
Here’s the general idea in a little illustration.
- The robot learns to associate visual stimuli with expected haptic sensations.
- The robot is surprised by a haptic sensation feeling different than expected. We use this difference as reward signal for exploration.
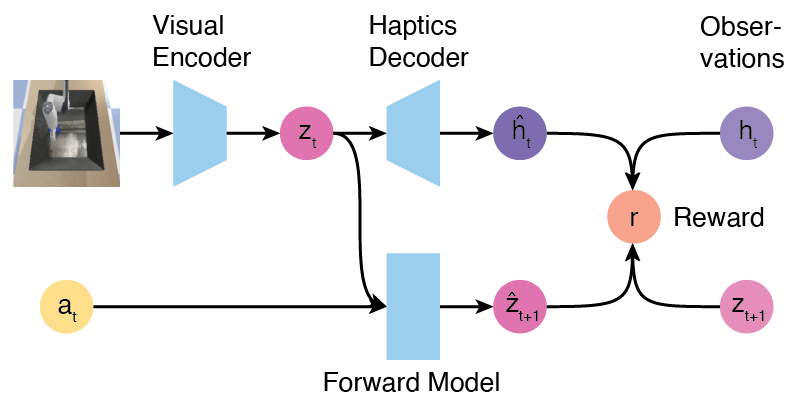
Here’s an outline of our architecture.
Demo
TODO - we have a little pybullet live demo in progress that’ll go here
Minitouch Benchmark
For this task, we designed a new small interaction benchmark that can be found here: MiniTouch - https://github.com/ElementAI/MiniTouch
Paper Code
TODO - the paper code is currently WIP and will be released shortly